Quadruped Robot
Overview
As part of Columbia's Robotics Studio course, I worked with a partner to design and build a four-legged walking robot from the ground up. The course covered the entire robot design process: sketching, CAD modeling, 3D printing, electronics integration, and Python programming.
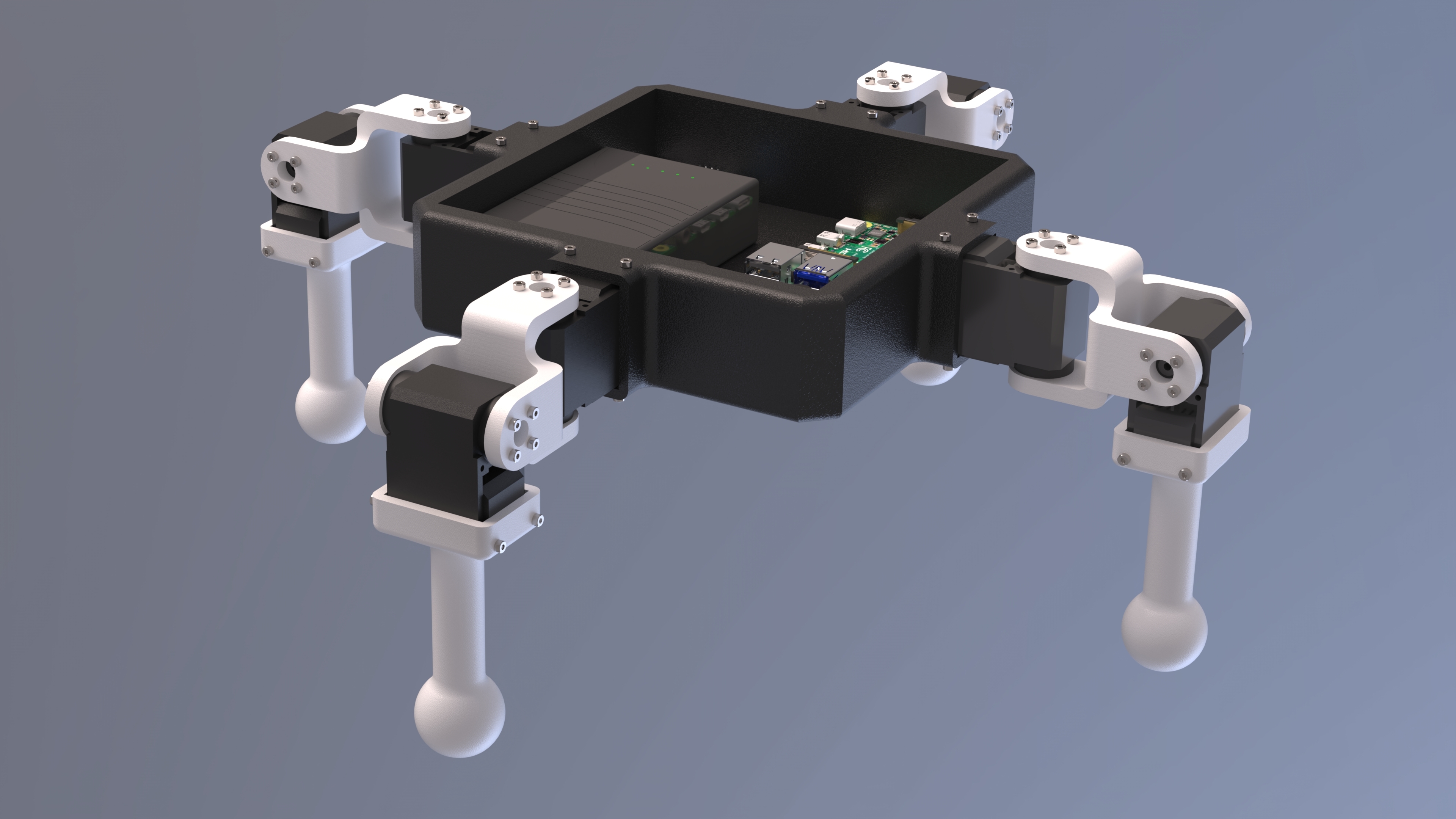
Our robot, nicknamed "FC Robocop", uses 8 serial bus servomotors (240° range) arranged in a mammalian configuration with 2 degrees of freedom per leg. It's controlled by a Raspberry Pi and powered by an onboard rechargeable battery.
Max Speed
11.32 cm/s
Servomotors
8
240° range each
DOF
2 per leg
Hip + Knee joints
CAD & Design
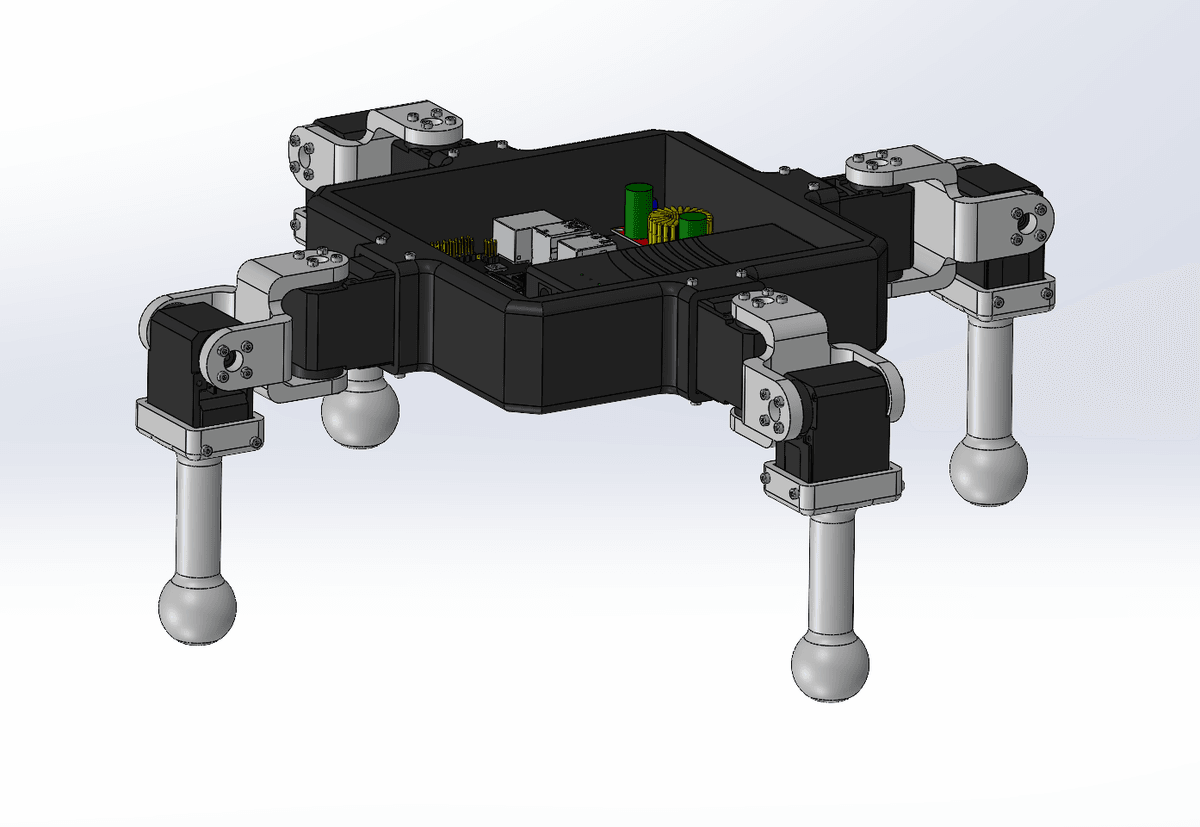
SolidWorks assembly model
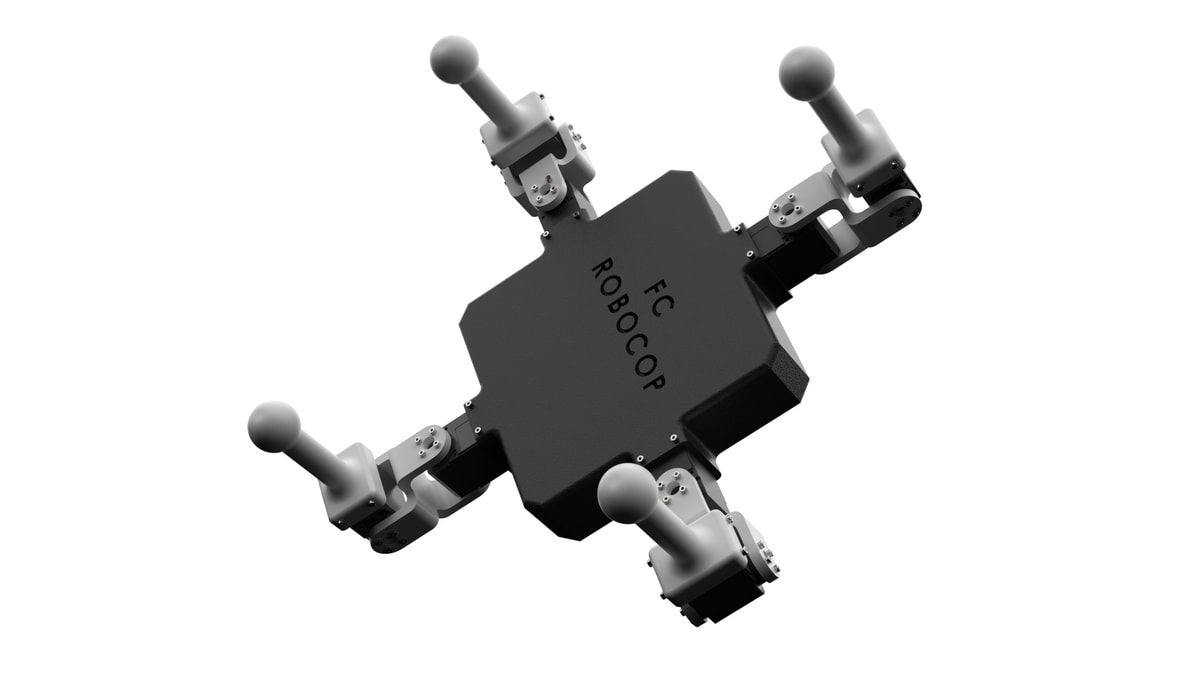
Bottom view with "FC Robocop" branding
Build
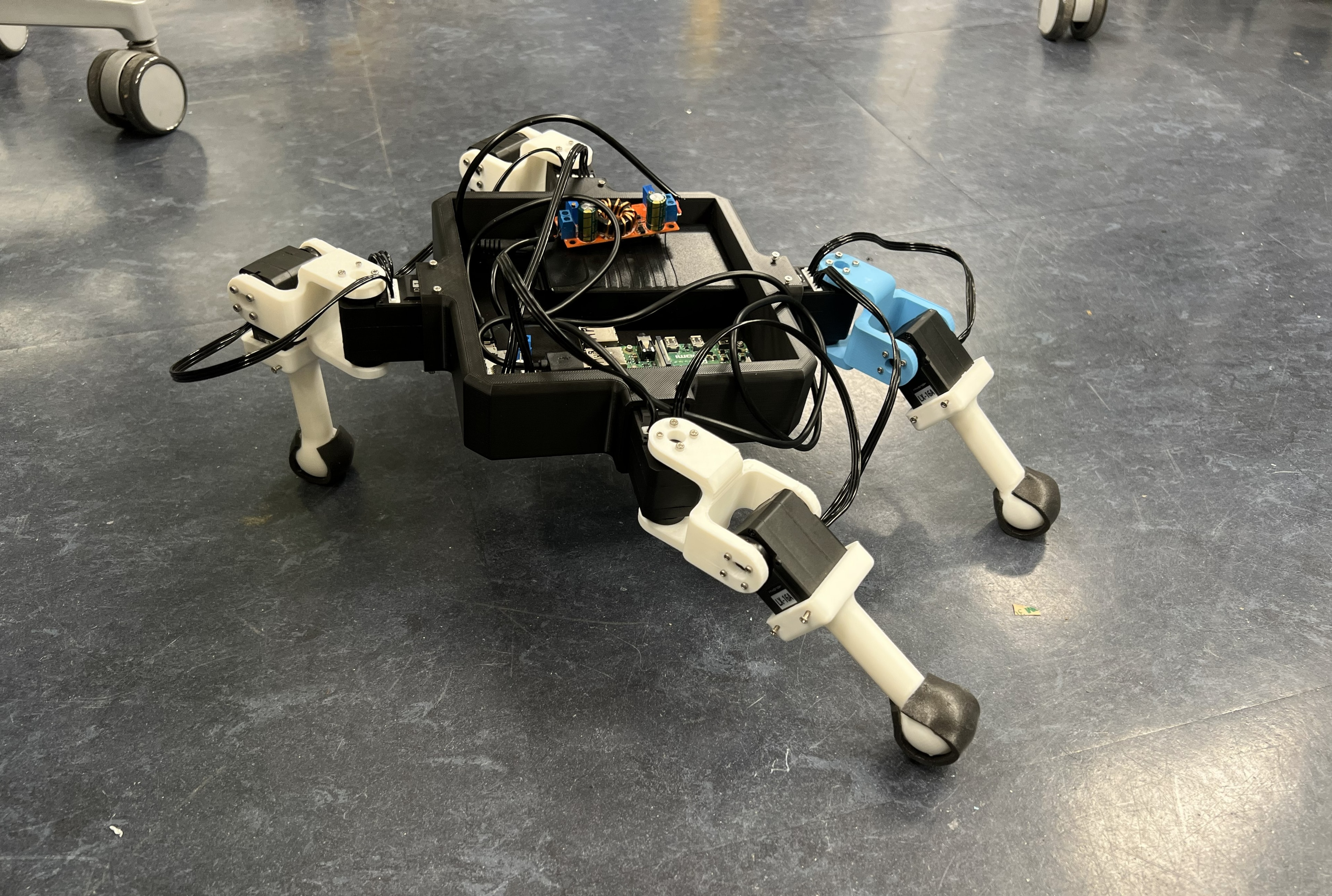
All structural components were 3D printed with careful attention to print quality and support removal. The body houses the Raspberry Pi, battery, and power regulation electronics. Each leg assembly bolts directly to the body with servos daisy-chained via serial bus.
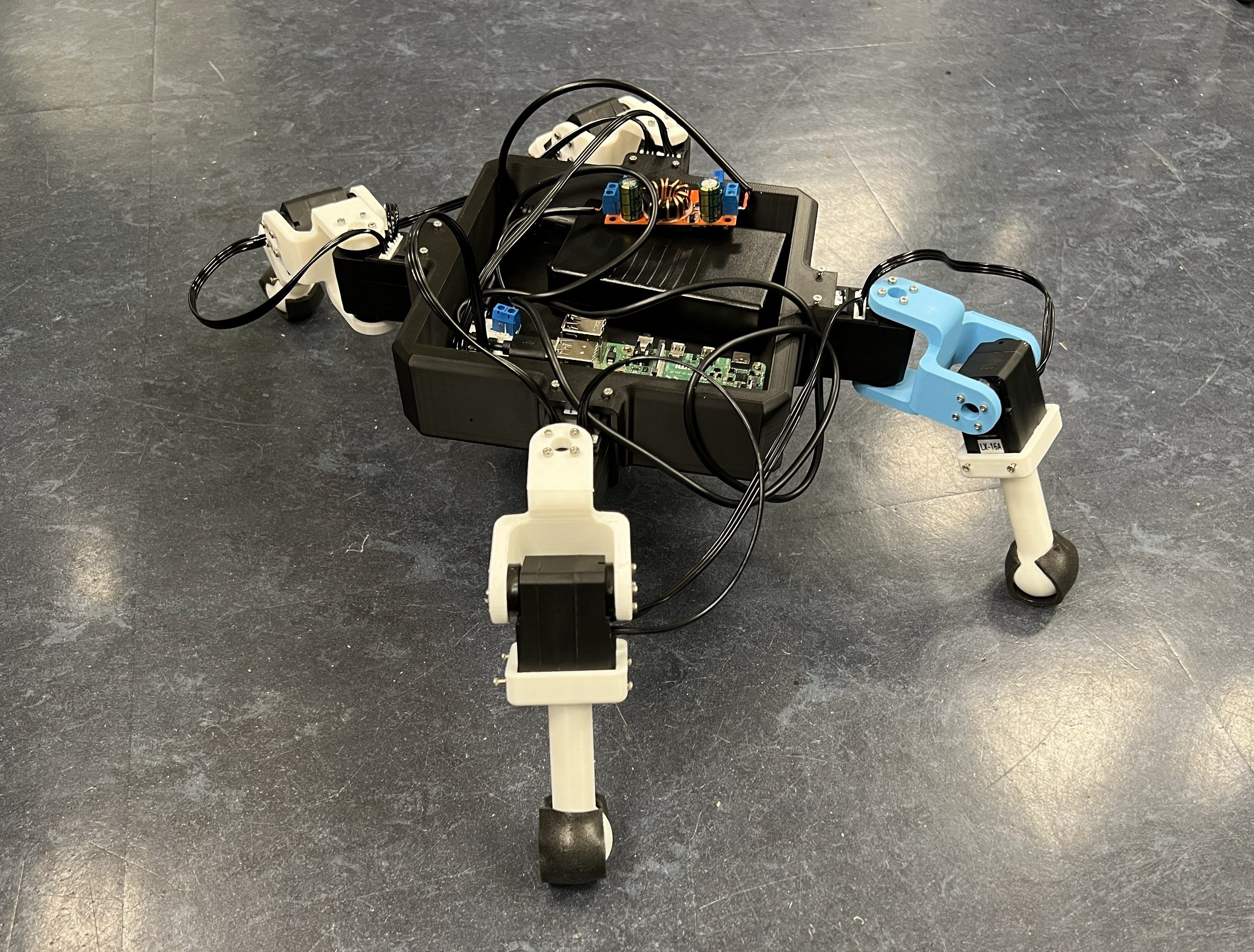
Completed robot with electronics installed
Hip bracket and servo assembly

Cable routing through leg
Gait & Programming
The walking gait uses a drag-and-push motion where only the knee servos move while the hips stay locked. This keeps all four feet in continuous ground contact for maximum stability.
Gait cycle (~1 second):
- Front knees retract, pulling body forward
- Rear knees extend, pushing body forward
- Rear knees retract to reset
- Front knees extend to reset
The Python code includes a health monitoring routine that tracks servo temperature, voltage, and position errors, plus a graceful shutdown that parks all legs before disabling torque.
# Gait cycle pseudocode
def walk_cycle():
# Phase 1: Pull with front legs
front_knees.retract()
# Phase 2: Push with rear legs
rear_knees.extend()
# Phase 3-4: Reset positions
rear_knees.retract()
front_knees.extend()
# Health monitoring
if servo.temp > TEMP_CRIT:
servo.disable_torque()
print("Overheating!")In Action
Want to see more?
View All Projects